



This is my second robotics project. It is intended to be a small line following robot.
This project started when I bumped into Byron Jeff at Austin's electronics in Norcross. He introduced me to the Microchip PIC chips *free samples* and his build your own programmer (TLVP) A zillion mail order purchases and hundreds of dollars later, the project is starting to take shape!
Here is some preliminary documentation
| Desired Size | 3"x6" |
|---|---|
| Processor | Microchip PIC 16F876A |
| Language | C |
| Compiler | Hitech C Lite |
| Programmer | Homebrew TLVP + picprg + mods from Byron Jeff |
| Bootloader | tinybld |
| Drive | 2 small Epson stepper motors |
| Sensors | 5 IR detection diodes |
I am new to this game, and so have spent a lot of time coming up to speed and acquiring "stuff." If you're new like me, I thought you might like these links. If you are an old pro, this list probably has some humor value. Places where I have acquired parts for this project:
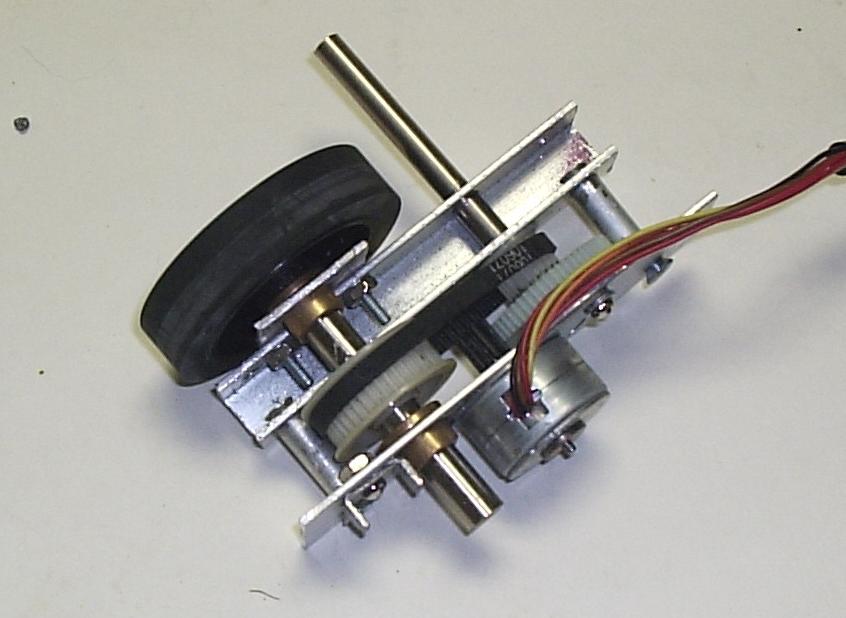
My second attempt at a drive train up close and personal (let's not
mention the first attempt.)
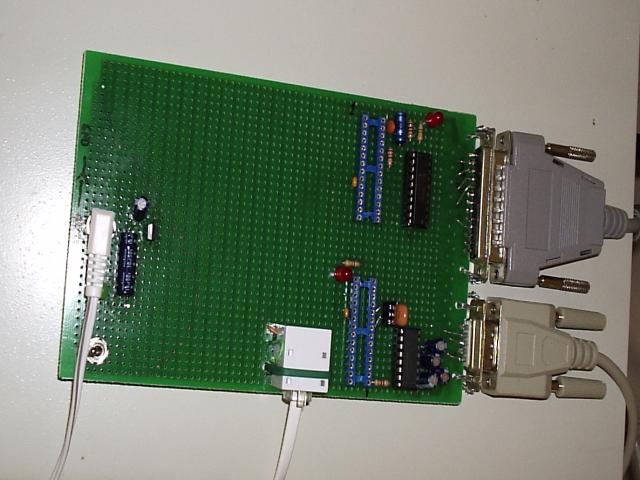
A picture of my homebrew pic programmer. On top is the programmer hooked
up to the parallel port. On the bottom is a MAX-232A that converts the
signals to 0-5V to talk to the circuit board through an RJ-11 jack.
This is a blurry picture of light cast by the LEDs as seen through my
camera. The light is not visible to the naked eye, so I have been using
my camera to debug this part of the circuit.
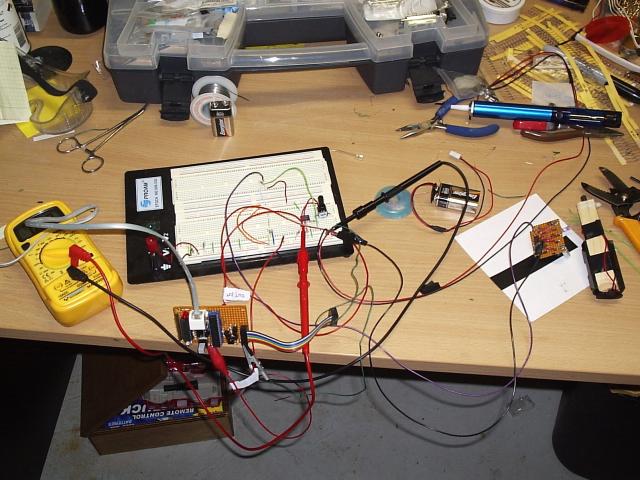
This is my setup for debugging the IR detection part of the circuit.
That is an op amp wired on the breadboard, and I have connected
everything up with test clips to see if it is my wiring at fault. At
this point, I have just discovered that everything works great until you
connect the output of the sensor to the processor pin.

